

Last week, we successfully implemented a new method. And I must admit, I was quite pleased because it opened up new perspectives for other vehicles. But that was before another discovery came along and shook things up. Before revealing this latest intriguing discovery, let’s see how we managed to fine-tune our Force Feedback settings.
Calling Stefano Casillo to the Rescue
I had serious doubts about one particular setting: GAIN. How did this setting behave, and did it have a default value? An ideal value, so to speak, that could be crucial for other settings.
And who better to answer this question than the spiritual father of KUNOS physics: Stefano Casillo. Despite returning to his first loves within the Italian studio and the workload, he took the time, once again, to grant me a few minutes and answer my questions on the subject.

There is no ‘ideal’ setting, which is why there is a user-adjustable parameter. The force feedback signal has a very wide range if you consider rapid peaks, like curb hits. GAIN can be used to avoid clipping or to optimize signal transmission during driving. A user with less powerful hardware might choose to increase the GAIN to enhance feedback, at the risk of significant clipping on high-speed curbs… Conversely, users with more powerful hardware can opt for a lower GAIN to preserve the full range of forces. In AC/ACC, the 100% value is defined as a reasonable balance between normal driving forces and higher loads with some clipping.
Simple yet complex…
To be honest, I wasn’t expecting such a comprehensive answer, but at least we have one less question now. The GAIN must be adapted according to your direct drive base. For my part, as you may have noticed, I use a ClubSport DD base with 12 Nm. In theory, it should handle 100% GAIN. But as we’ll see later, with this beautiful Italian car, it won’t be that simple.
Hitting the Track
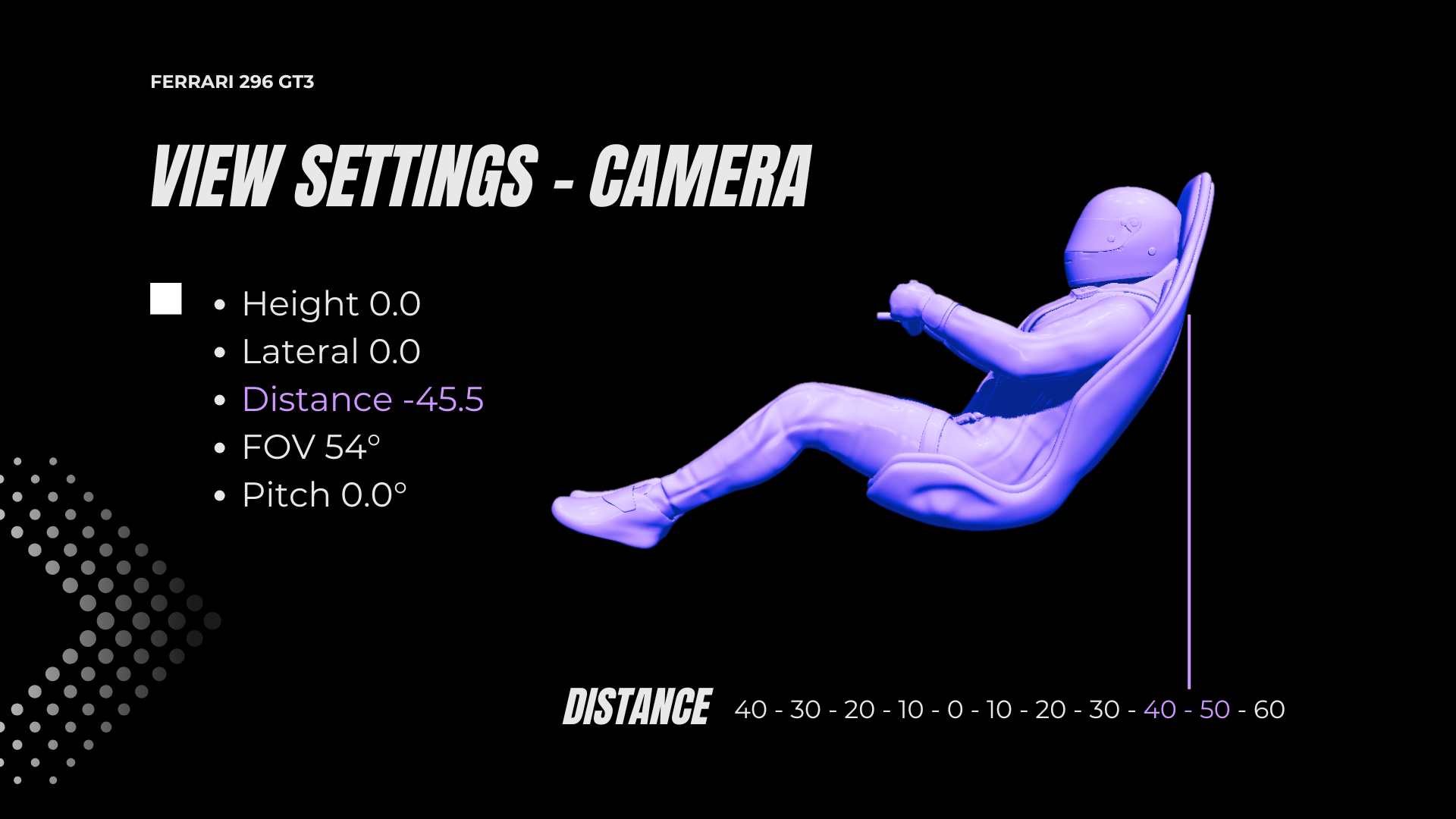
For once, I wanted to drive on the Spa-Francorchamps circuit. With the DISTANCE value, we had excellent balance. But as it’s often good to question ourselves and revisit our methods, I decided to start this time with a value of 50 for both GAIN and FORCE of the base.

📌 SUGGESTION: Select the cockpit view without the steering wheel.
And I must say that, despite the extremely low FFB, it was immediately clear that the DISTANCE needed slight adjustment. Previously, we had a DISTANCE setting of -45.0. Here, on the Spa-Francorchamps circuit, the balance appeared at -45.5.
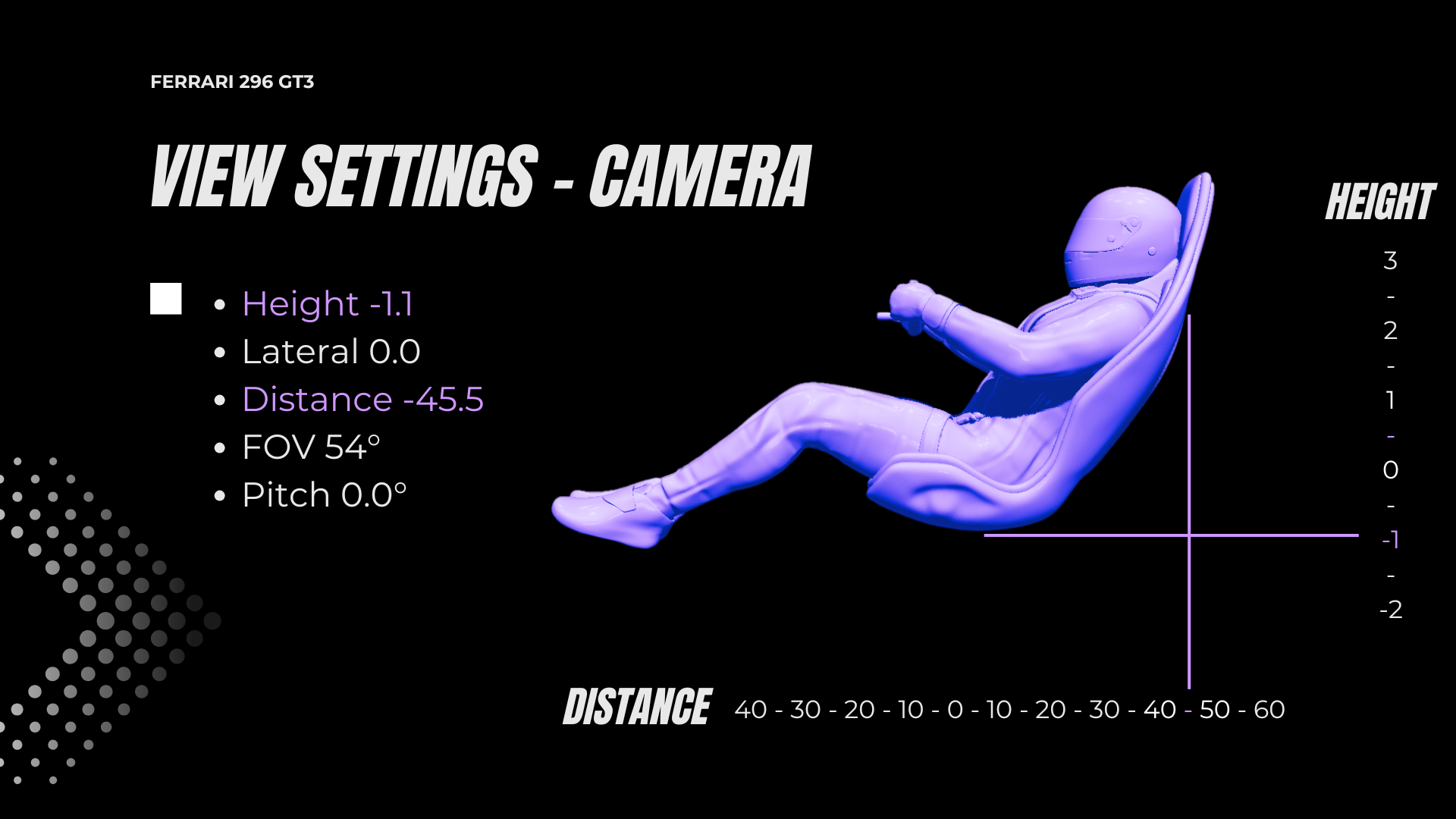
A slight adjustment that makes perfect sense, as it allowed me to fine-tune another essential parameter: HEIGHT.
Adjusting the DISTANCE in the COCKPIT VIEW – CAMERA settings significantly impacted the HEIGHT parameter.
A small note, we had an initial clue about the influence of the CAMERA parameters (HEIGHT – DISTANCE – PITCH) with the MEMS sensors.
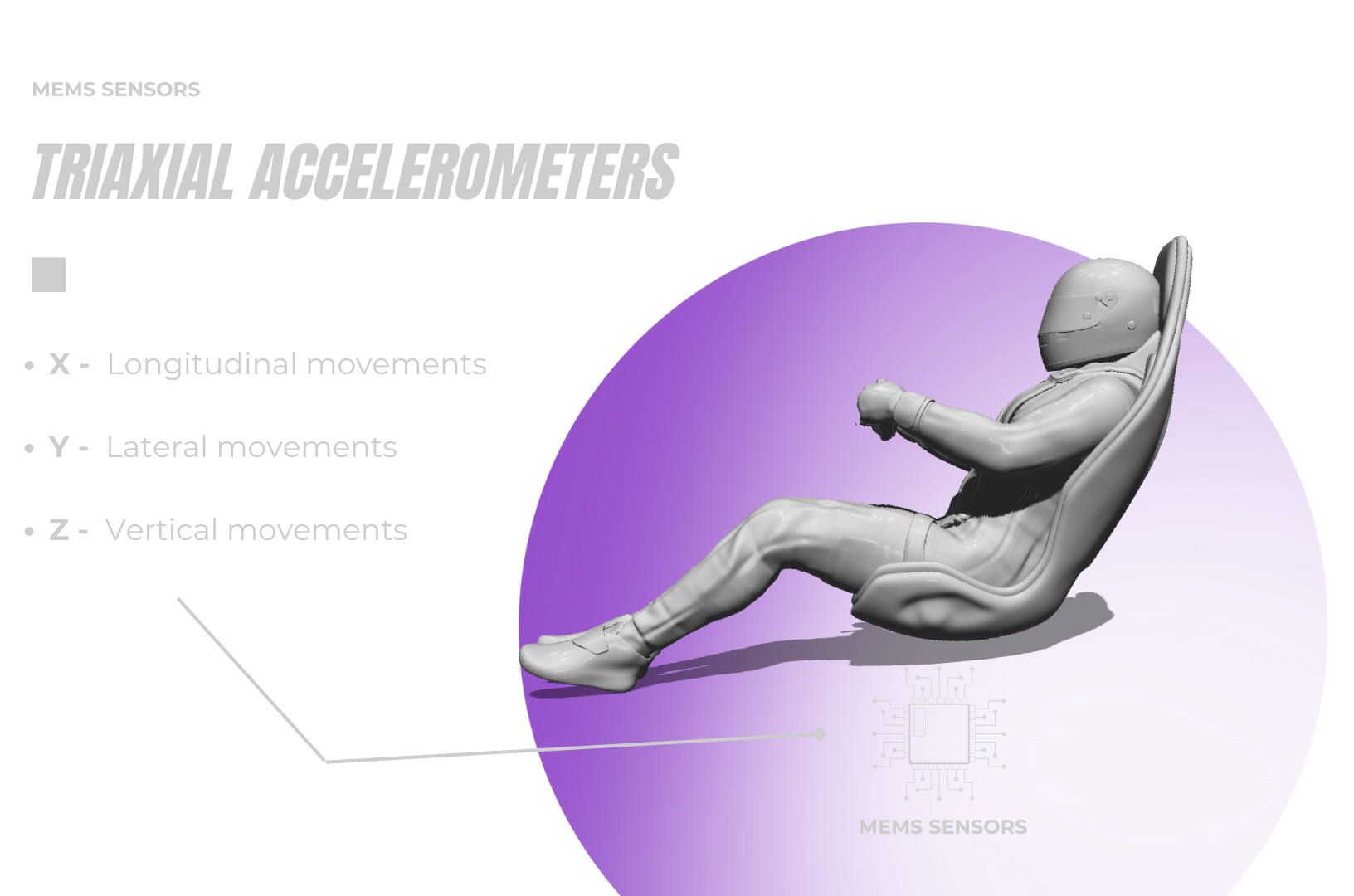
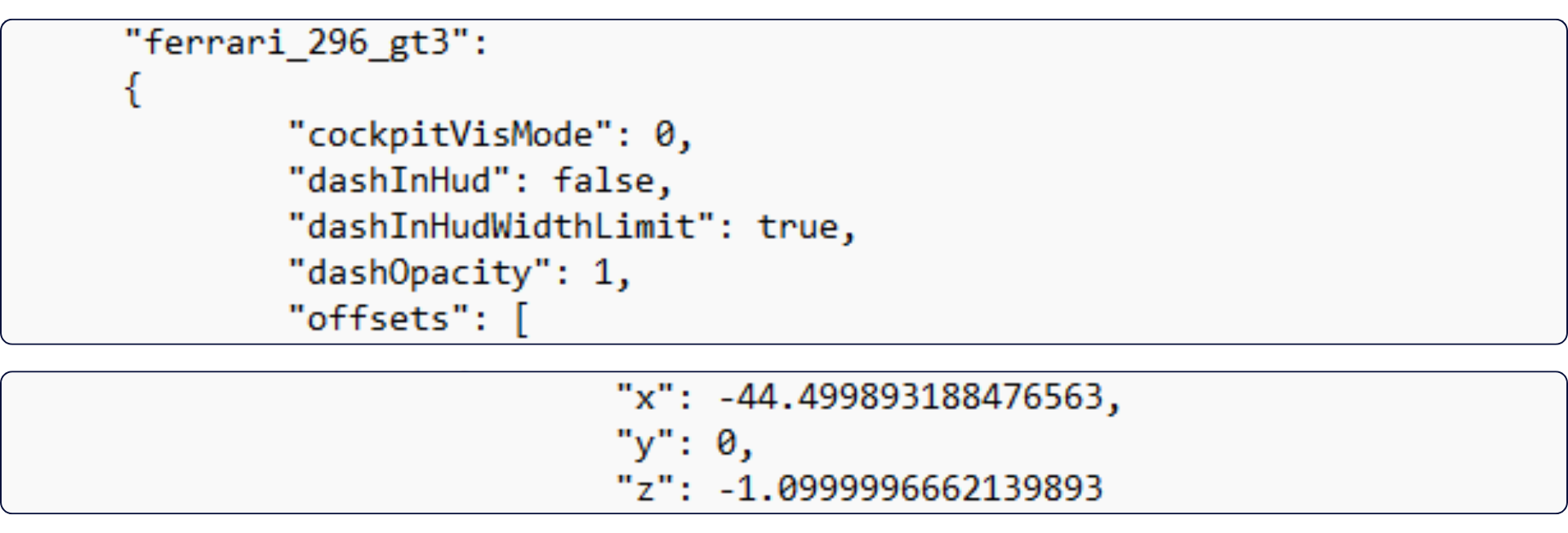
It’s clear that they play a crucial role in the game’s physics feel. And if we look at the game files, we can confirm that the three parameters are named X, Y, and Z. So, are these MEMS parameters a red herring? Hard to say…
But back to our beautiful Italian car on this magnificent Belgian track. Lowering the HEIGHT to -1.1m allowed me to lock the steering in an even more significant way. The perfect balance that lets us evolve the other parameters.
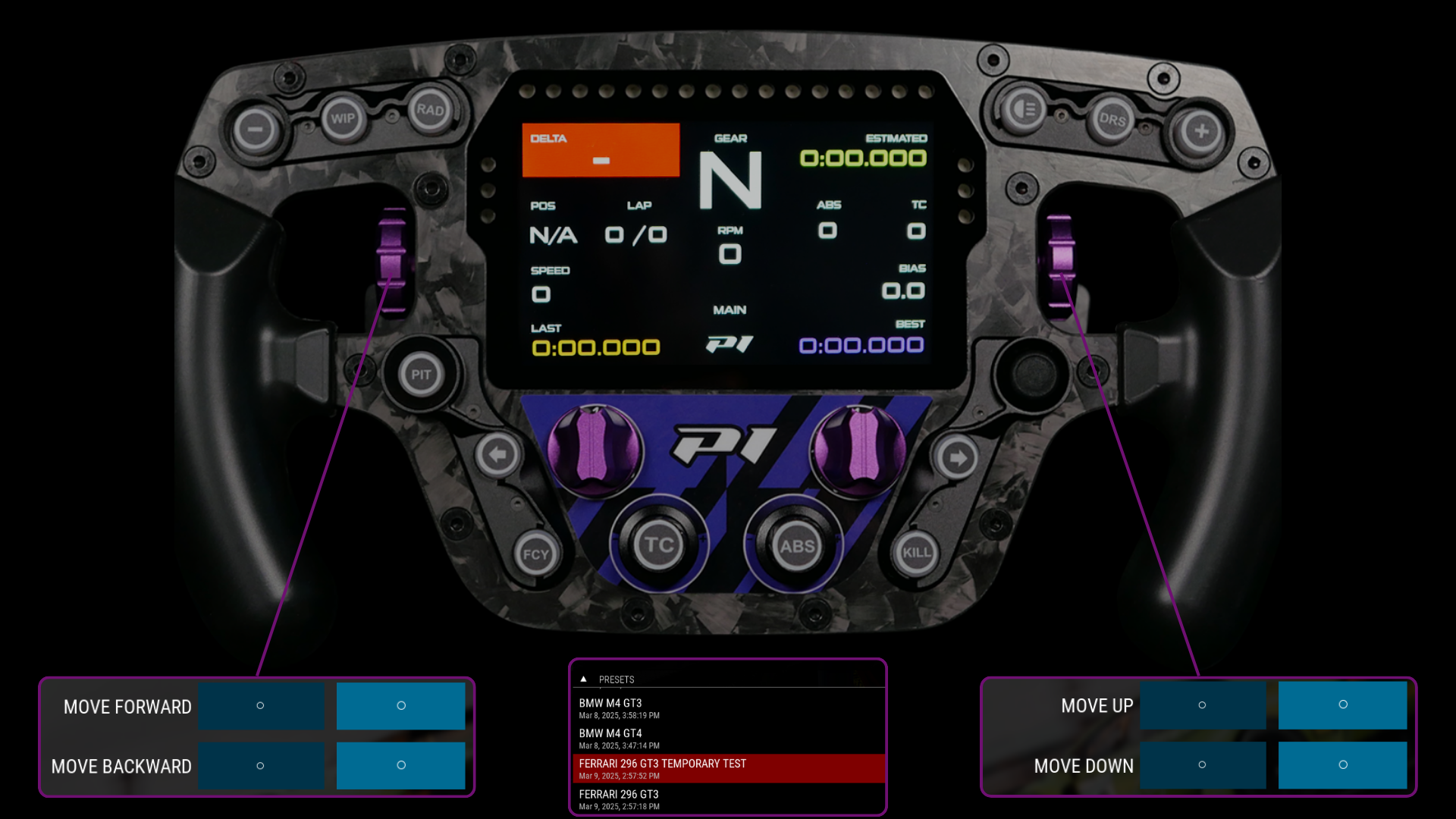
📌 SUGGESTION: With a temporary profile, you can assign the following buttons to the DISTANCE ans HEIGHT function. Simple and effective for adjusting the value while driving.
Enhancing Forces
The first element I wanted to maximize was the overall force of the Direct Drive base. We set the FOR element to 100, allowing us to animate the game’s physics at 6 Nm.
Next, I wanted to adjust the FFB USER while seeing how the FFB value of our ClubSport DD base behaved.
There is a certain symbiosis between the two elements (FFB / FFB USER). One is essential for the other…
38 for the Direct Drive base FFB and 0.53 for the FFB USER. Both seem to work perfectly on the steering, keeping it smooth while being highly informative during sudden tire stresses.
We still needed to adjust the crucial element in the simulation: GAIN.
GAIN: The Mysterious Element
As we discovered, GAIN does not have an ideal value. I want to thank Stefano Casillo warmly for helping us in our quest for the perfect FFB.
Starting at 50 %, I gradually increased the GAIN by 10 while driving on the track. The track condition was OPTIMAL, and the weather was dry. While previously, I wanted to understand grip on a wet track, this time, the goal was to see how GAIN affected lap times on a dry track. At a value of 75, there was a noticeable improvement in overall tire behavior.
📌 Using the correct steering rotation allows us to fully explore the physics within the proper operating range. Additionally, it’s the only way to achieve a realistic steering lock in a simulation.

For me, 88 is the ideal value in this case. The grip is excellent with plenty of information, while still indicating tire adhesion loss during heavy stress.
Interestingly, going beyond 88 provides superior grip on the track, significantly improving lap times but at the cost of losing valuable information. This is particularly noticeable on curbs, which become less informative.
In this configuration and resolution of 3440 x 1440, I must emphasize this point because what follows will surprise you: the FFB is excellent. At least, that’s my perspective as an amateur virtual pilot, and it meets my expectations.
Disaster Approaches !
As a reminder, I used to drive with a single SAMSUNG monitor with a resolution of 3440 x 1440. It suited me perfectly, but like any good sim racer, I always wanted to enhance my sensations by upgrading my equipment.
I acquired two additional identical monitors to upgrade my entire resolution to 10320 x 1440. Although I’m aware that these three curved monitors might not be the ideal setup, it suits me perfectly.
And that’s when the trouble started. As soon as I switched to a wide resolution (10320 x 1440), my FFB and overall balance changed instantly. It was such a significant change that I even wondered what could influence these sensations so much.
Changing the FOV on a single monitor already affects the steering feel. So, imagine the impact when switching to a resolution as wide as a triple-screen setup.
Interestingly, we had to adjust the DISTANCE to -35.0 and the HEIGHT to 0.3. Yes, surprisingly, we had to adapt the X and Z axes due to the wider resolution. Additionally, the steering became even smoother, as if the overall balance had reached a new dimension.
So, in short, we already have our initial parameters: GAIN, FFB USER, and Direct Drive base FFB. Not to mention the steering rotation, which is crucial for the steering lock and its usage range.
Between Laughter and Tears…
We discovered that the X, Y, and Z axes also play a role in the game’s physics.
Seven parameters are already a lot to manage, especially without ideal default settings. Even for GAIN, there is no ideal value, as Stefano Casillo explained, since it can vary depending on our hardware.
So, what if, on top of these elements, we realize that our screen resolution and TRIPLE SCREEN parameters can also influence the game’s physics? That might be too much! We are not track engineers but virtual pilots who want to enjoy our favorite simulation.
Don’t get me wrong: KUNOS SIMULAZIONI has provided us with one of the best bases for work and fun. But sharing specific settings no longer makes sense. How can we give advice or share an element if it varies with so many variables? Not to mention that we still lack a reference point. I don’t have a friendly GT3 pilot neighbor who could give me feedback and tell me if my settings are on point…
So, what should we do? For my part, I hope this approach will benefit the future of the EVO title. Perhaps they can lock down some elements and variables to make our approach to our favorite simulation easier. I understand KUNOS’s desire to offer a raw diamond.
But for me, I don’t have all the information to cut the diamond to perfection, which can be frustrating!
Leave a Comment